Andreagiovanni Reina, Research Group Leader —
GIO Lab —
Group Intelligence and self-Organisation



Centre for the Advanced Study of Collective Behaviour, Universität Konstanz & Max Planck Institute of Animal Behavior, Germany
Collective foraging with minimalist agents
How groups of cooperative foragers can achieve efficient and robust collective foraging is of interest both to biologists studying social insects and engineers designing swarm robotics systems. Of particular interest are distance-quality trade-offs and swarm-size-dependent foraging strategies. In engineering, large swarms of simple autonomous robots can be employed to find objects clustered at random locations, and transport them to a central depot. This solution offers system parallelisation through concurrent environment exploration and object collection by several robots, but it also introduces the challenge of robot coordination. Inspired by ants' foraging behaviour, we successfully tackle robot swarm coordination through indirect stigmergic communication in the form of virtual pheromone trails. We design and implement a robot swarm composed of up to 200 Kilobots (see video below) using the recent technology Augmented Reality for Kilobots (ARK) developed at Sheffield Robotics (Reina et al., RA-L 2017). Using pheromone trails, our memoryless robots rediscover object sources that have been located previously. The emerging collective dynamics show a throughput inversely proportional to the source distance. We assume environments with multiple sources, each providing objects of different qualities, and we investigate how the robot swarm balances the quality-distance trade-off by using quality-sensitive pheromone trails. To our knowledge this works represents the largest robotic experiment in stigmergic foraging, and is the first complete demonstration of ARK, showcasing the set of unique functionalities it provides.
Our results are of potential interest to both swarm engineers and behavioural ecologists, in that they demonstrate the sufficiency of very simple individual agents to generate sophisticated collective behaviour, as well as its scaleability, and reproduce empirically observed or theoretically predicted patterns. These studies follow previous work that used swarm robotics as a useful tool in advancing the understanding of biological systems.
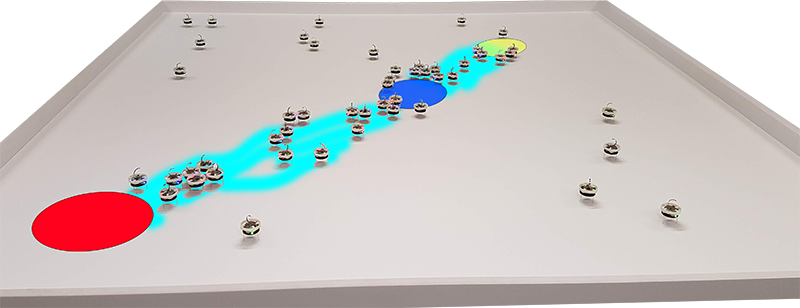
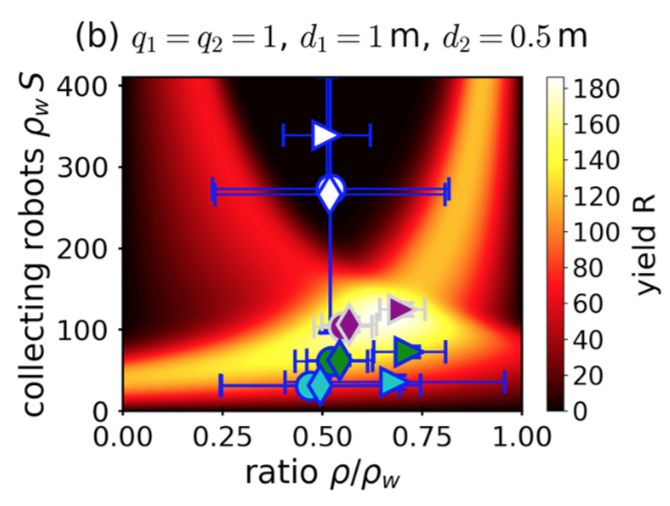
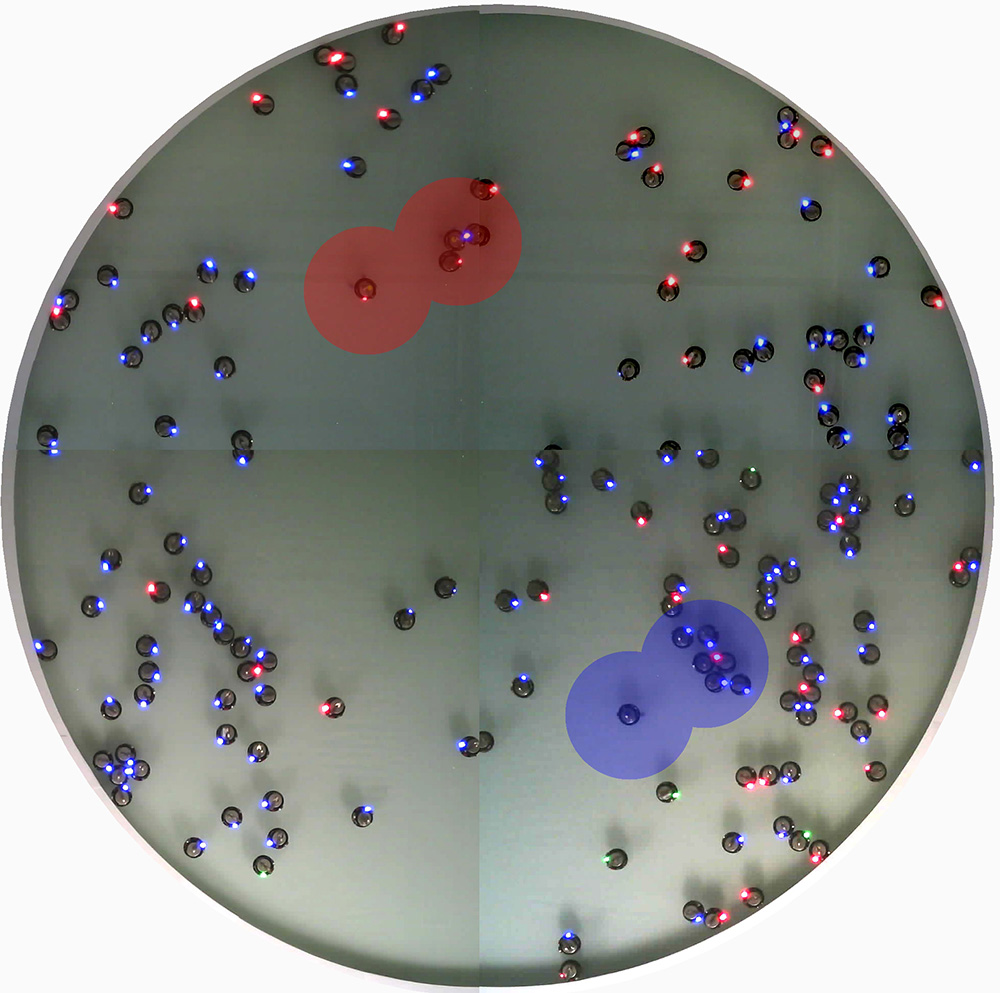
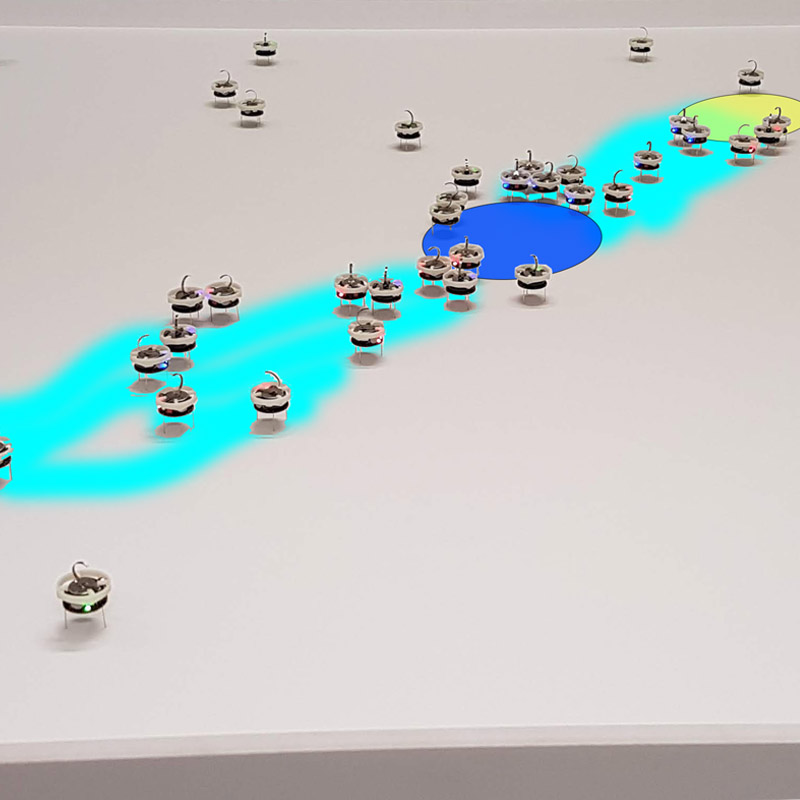
Through ARK (Reina et al., RA-L 2017), we tested pheromone-based collective foraging in a swarm of Kilobots. The left picture shows a 50 real Kilobots experiment with the virtual environment superimposed on the image. The robots are tasked to collect resources from source areas at unknown locations. In the left picture, there are two circular source areas, one red (bottom- left) and one yellow (top-right) placed at 1m and 0.6m, respectively, from the central (blue) depot. The robots deposit and follow virtual pheromone (light-blue shades) which they employ as a form of collective memory. The right panel shows the comparison between the optimal foraging model (density map) and the robot swarm performance (symbols). For certain parameterisation, the robot swarm approximates the optimal strategy despite its extreme simplicity (Talamali et al., Swarm Intl. 2020).
- M.S. Talamali, T. Bose, M. Haire, X. Xu, J.A.R. Marshall, A. Reina. Sophisticated Collective Foraging with Minimalist Agents: A Swarm Robotics Test. Swarm Intelligence 14(1):in press, 2020.
- A. Font Llenas, M.S. Talamali, X. Xu, J.A.R. Marshall, A. Reina. Quality-sensitive foraging by a robot swarm through virtual pheromone trails. In Proceedings of 11th International Conference on Swarm Intelligence (ANTS), LNCS 11172: 135--149. Springer, Cham, 2018.
Engineering distributed decision-making
|

Value-sensitive
decision-making |
Collective foraging with minimalist agents
|
Swarm Awareness
|