







Andreagiovanni Reina, Research Group Leader —
GIO Lab —
Group Intelligence and self-Organisation



Centre for the Advanced Study of Collective Behaviour, Universität Konstanz & Max Planck Institute of Animal Behavior, Germany

9-11 October 2024 ANTS 2024
I am co-organising the 14th International Conference on Swarm Intelligence (ANTS). It will be held in Konstanz, Germany, on 9-11 October 2024. It would be fantastic to meet you here. Submit your paper by the deadline, April 7th!
13 - 17 May 2024 Attending ICRA 2024
Attending the 2024 IEEE International Conference on
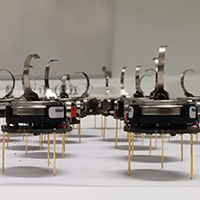
Robotics and Automation in Yokohama, Japan, where I will present my recent work on Multi-Swarm Interaction through Augmented Reality for Kilobots. Check out the video too!
I hope to see you in Yokohama!

6 - 10 May 2024 Attending AAMAS 2024
Attending the 23rd International Conference on Autonomous Agents and Multi-Agent Systems (AAMAS) in Auckland, New Zealand, where I will present my recent work on Collective robustness of heterogeneous decision-makers against stubborn individuals.
I hope to see you in Auckland!

January 30, 2024 PhD Examiner
I had the honour to serve as one of the PhD examiners of Nicolas Coucke who brilliantly defended his PhD thesis on "Embodied collective decision making" and obtained his well-deserved doctoral degree. Congratulations, Dr Coucke!

22 - 25 January 2024 Attending NetSciX 2024
Attending the conference NetSciX 2024 in Venice, where I will present my recent work on speed-accuracy trade-offs in best-of-n collective decision-making through heterogeneous mean-field modelling.
I hope to see you in Venice!
Jan 2024 Recruiting!
We are recruiting a talented PhD student in Collective Robotics.
An excellent opportunity to design the technologies of our future by combining collective animal behaviour and large-scale robotics.
Find more details here.
December 1, 2023 New position!
Fantastic news! I move to Germany to join the Centre for the Advanced Study of Collective Behaviour at the University of Konstanz & Max Planck Institute of Animal Behaviour. I will be a new research group leader as part of a fabulous community! Looking forward to this new adventure!!
August 10, 2023 New article
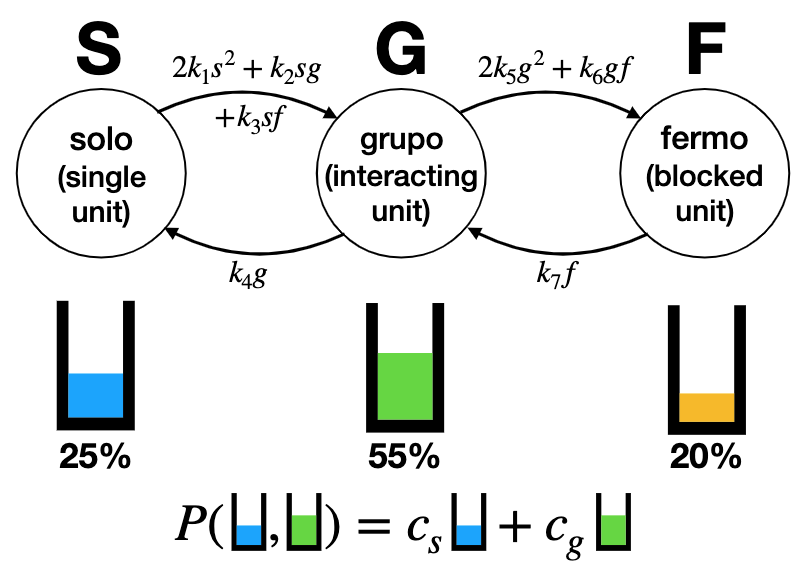
In our latest article, we show that "Cross-inhibition leads to group consensus despite the presence of strongly opinionated minorities and asocial behaviour" by Andreagiovanni Reina, Raina Zakir, Giulia De Masi, and Eliseo Ferrante; has been accepted for publication in Communications Physics, a journal of the Nature Portfolio. I like this study very much; please have a look at the video.
31 July - 12 August 2023 Invited lecture
Honoured to have been invited as a speaker at the 2023 Konstanz School of Collective Behaviour held in Konstanz (31 July - 12 August 2023). I will be speaking about "Discovering the marvels of collective decision making". Hope to see you in Konstanz!

July 18, 2023 New article
The article "Coherent movement of error-prone individuals through mechanical coupling" by Federico Pratissoli, Andreagiovanni Reina, Yuri Kaszubowski Lopes, Carlo Pinciroli, Genki Miyauchi, Lorenzo Sabattini, and Roderich Groß has been accepted for publication in Nature Communications. In our work, we how an aggregate of self-propelled robots—that are unable to move coherently when alone—can successfully navigate in the environment when physically linked together.
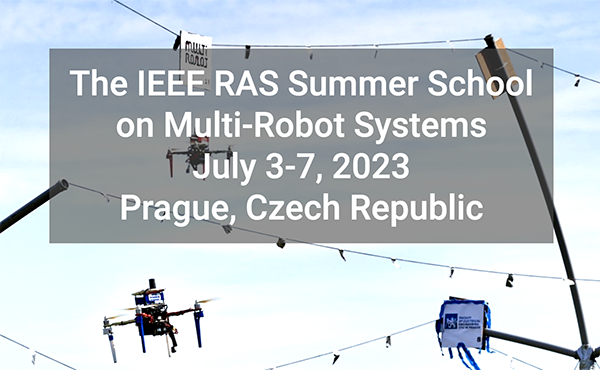
3-7 July 2023 Invited lecture
Attending as an invited lecturer the IEEE RAS Summer School on Multi-Robot Systems held in Prague (3-7 July 2023). Giving a lecture on "Collective Decision Making in Robot Swarms". Thank you for inviting me, Martin and Vera! A great event.
1 - 4 May 2023 Attending FITGD 2023
Attending the workshop From individual to group decision making organised by the Weizmann Institute of Science in Tel Aviv, Israel. I will be speaking about "Cross-inhibition leads to group consensus despite the presence of asocial behaviour".
17-21 April 2023 Invited lecture
Honoured to have been invited as a speaker at the conference Interdisciplinary challenges: from non-equilibrium physics to life sciences held in Rome (17-21 April 2023). I will be speaking of "Undecided individuals can restore agreement when asocial behaviour hinders group consensus". Hope to see you in Rome!

March 15, 2023 New article
The article "Asynchrony rescues statistically-optimal group decisions from information cascades through emergent leaders" by Andreagiovanni Reina, T. Bose, V. Srivastava, and James A.R. Marshall has been accepted for publication in Royal Society Open Science. In our work, we information cascades in networks of Bayes-optimal individuals with a limited cognitive load.

March 14, 2023 Invited lecture
For the Brain Awareness Week of the Université Libre de Bruxelles, I'll give a talk on "The honeybees may unlock the secrets of how the human brain works" (in French, Les abeilles peuvent révéler les secrets du fonctionnement du cerveau humain)
More info: braincouncil.be.
A story based on my research with James Marshall, Vito Trianni, Thomas Bose, and Angelo Pirrone. Main articles on this subject: this and this.
6-10 February 2023 Short visit
Great to spend one week in Berlin visiting the amazing groups linked to the Science of Intelligence cluster. So many great scientists with an interest in collective behaviour, among which Jens Krause, Max Wolf, Ralf Kurvers, Pawel Romanczuk, and Tim Landgraf. It has been great meeting them all and enjoying stimulating discussions.

28 November - 2 December 2022 Award
Glad to make a second visit to A.I.Lab of Roman Senkerik as part of the grant for "Support of International Cooperation" awarded to me by the Czech Republic Government, which recognised me as the scientific expert for pedagogical and scientific training at Tomas Bata University in Zlín (CZ).

November 25, 2022 Invited lecture
Invited lecture the Multi-robot System Group of the Czech Technical University in Prague. Thank you, Martin Saska, for the opportunity to meet your lab members and present my work.

7-18 November 2022 Hosted visiting researcher
Happy to have hosted at IRIDIA, ULB for two weeks the visiting researchers Dr. Michal Pluháček from Tomas Bata University in Zlín, with whom I will collaborate on decentralised algorithms for robot swarms. Happy to host you, here, Michal!

2 - 4 November 2022 Attending ANTS 2022
Attending the conference ANTS 2022. My co-authors and I will present our five (5!) articles accepted for publication at the conference. The ANTS conference is a great event to meet some of the best scientists in swarm intelligence and I am happy to not miss it. :-)
August 29, 2022 New article
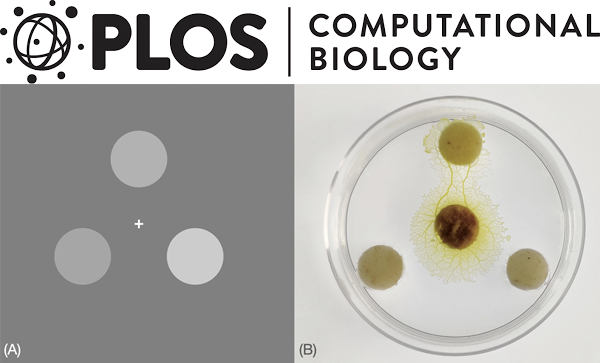
The article "Magnitude-sensitive reaction times reveal non-linear time costs in multi-alternative decision-making" by James A.R. Marshall, Andreagiovanni Reina, Célia Hay, Audrey Dussutour, and Angelo Pirrone has been accepted for publication in PLoS Computational Biology. In our work, we study multi-alternative decision making in humans and slime moulds, and link the experimental results with normative models of optimal policies.
July 1, 2022 New paper
The article "Impact of the update time on the aggregation of robotic swarms through informed robots" has been accepted for publication in the Proceedings of SAB 2022, From Animals to Animats 6 the 16th International Conference on the Simulation of Adaptive Behavior. A paper that I co-authored with Antoine Sion, Mauro Birattari, and Elio Tuci. Well done!
June 15, 2022 New articles
Five (!) articles accepted for publication in the Proceedings of ANTS 2022, the 13th International Conference on Swarm Intelligence. Such extraordinary throughput of new scientific results has only been possible thanks to the brilliant students I work with, Raina Zakir, Swadhin Agrawal, Till Aust, Alexandre Pacheco, and Antoine Sion. Thank you for the amazing job!
May 18, 2022 New article
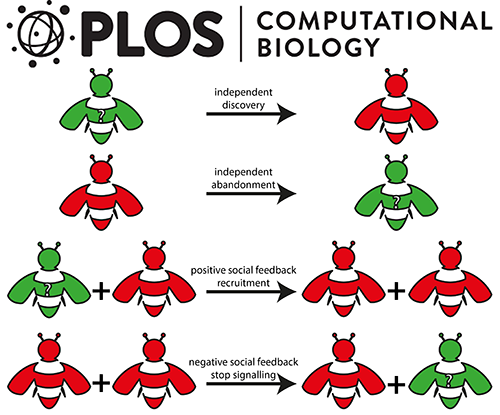
James and I have published the article "Negative feedback may suppress variation to improve collective foraging performance" to PLoS Computational Biology. In our work, we suggest an additional function for negative feedback signals during foraging in social insects, variance reduction.
May - October 2022 Hosted visiting researcher
Happy to host at IRIDIA, ULB for 6 months the visiting PhD student
Luigi Feola from the laboratory of Vito Trianni at the CNR of Rome.
With me, he will investigate how to use random walks to obtain aggregation in robot swarms, using the IRIDIA Kilobot swarm.
Welcome, Luigi!
Looking forward to working with you and the Kilobots!

April 25, 2022 PhD Examiner
I have been honoured to serve as one of the PhD examiners of Volker Strobel who brilliantly defended his PhD thesis and obtained his doctoral degree. Congratulations, Volker!
April 1, 2022 Postdoc supervision
Very happy to welcome Thierry-Sainclair Njougouo who joined the University of Namur to begin his 2-year postdoc on "Modelling collective decision making in robot swarms through hypergraph theory", under the joint supervision of Elio Tuci, Timoteo Carletti, and myself. Looking forward to building cool models and improving our robot swarms together! Welcome Thierry!!

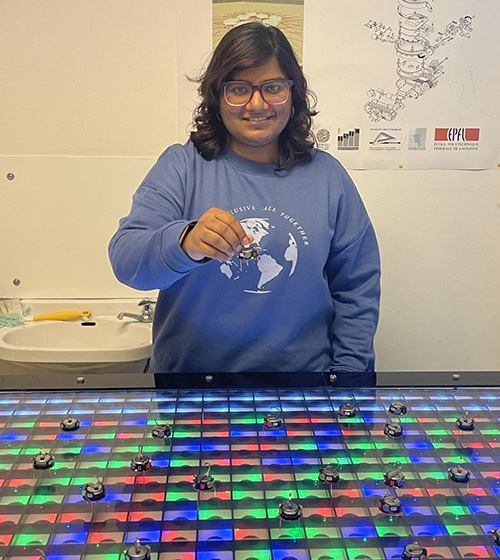
21-25 February 2022 Hosted visiting researcher
Happy to have hosted at IRIDIA, ULB for 5 days the visiting researchers Dr. Michal Pluháček and Jan Kincl from Tomas Bata University in Zlín. Their help in setting up the ARK system (Augmented Reality for Kilobot) in our Lab has been key to the success. Thank you for visiting us!

November 9, 2021 Open position
We are recruiting a 2 year postdoc to join naXys at the University of Namur. The postdoc will work on modelling collective behaviour through hypergraphs. Please check the call details at: https://www.naxys.be/2021/11/postdoctoral-research-associate.

November 8, 2021 Visiting student
Happy to host Till Konrad Aust at the IRIDIA Lab for 6 months. He joined us from the University of Lübeck and here will conduct a study on "Adaptive symmetry breaking in robot swarms", and will play with the Kilobots and the IRIDIA's Kilogrid! Welcome Till!
November 5, 2021 New article
Magnitude-sensitivity: a simple result offering a window into fundamental issues in decision-making and leading to a reconsideration of prominent computational and optimal models of decision-making. Our review "Magnitude-sensitivity: rethinking decision-making" has hit the front page of
Trends of Cognitive Sciences.
Thanks to my amazing co-authors, Angelo, Tom, James, and Fernand, for writing this nice article with me!
November 1, 2021 PhD supervision
A warm welcome to Raina Zakir who starts her PhD studies under my supervision (together with Marco Dorigo) at IRIDIA, ULB. Her studies will focus on "Resiliency of collective decision making in robot swarms", with a scholarship funded by TRAIL — Walloon Trusted AI Labs — with the ARIAC Project.

4-8 October 2021 Award
Awarded a grant for "Support of International Cooperation for 2020" by the Czech Republic Government to go as a scientific expert for pedagogical and scientific training at Tomas Bata University in Zlín (CZ). This grant covers the cost for a sequence of visits by me then and of researcher from Zlín to my current institution. Due to covid19, my first visit to Zlín has only taken place between 4 and 8 October 2021.

September 19, 2021 New article
The article "Input-dependent noise can explain magnitude-sensitivity in optimal value-based decision-making" has been published on the journal of the Society for Judgment and Decision Making (SJDM) and the European Association for Decision Making (EADM). It's open access, so go and check it out if you are curious to know more. Thank you, Angelo and Fernand, to invite me to conduct this study with you!

July 28, 2021 New article
The article "When less is more: Robot swarms adapt better to changes with constrained communication" has been published today on the prestigious journal Science Robotics. Thanks to all my fantastic co-authors for the amazing job!
July 1, 2021 PhD supervision
Excited to be part of the co-supervision team of Antoine Sion who starts today his PhD at the University of Namur under the supervision of Elio Tuci, Mauro Birattari, and myself. His studies will focus on "Controlling a robot swarm through a minority of informed individuals", with a scholarship funded by TRAIL — Walloon Trusted AI Labs — with the ARIAC Project.
June 2021 Special Issue
The Special Issue on Collective Decision Making in Natural and Artificial Systems, that I edited with Eliseo Ferrante and Gabriele Valentini has been published in the journal Swarm Intelligence, vol. 15, issue 1-2. My co-editors are and.
Check out the great collection of articles we have put together. A special thank you to the paramount help of our reviewers!

June 9, 2021 New article
The article "Scalability in Computing and Robotics" has been accepted for publication on the prestigious journal IEEE Transactions on Computers. Thank you, Heiko, for taking me on this fun journey.

24 - 26 March 2021 Attending R2T2 2021
Attending the fantastic Embodied Intelligence Workshop. A line of speakers absolutely extraordinary!! A big THANK YOU to the organisers for offering this brilliant event free of charge.
March 15, 2021 PhD Supervision
Congratulations to Dr Aldo Encarnación Segura for obtaining his PhD from the University of Sheffield with a brilliant thesis on "Cellular decision-making models in yeast". A fantastic interdisciplinary quest that bridges biochemistry and collective behaviour. It has been a great pleasure to accompany you throughout your PhD studies, together with James Marshall and Thomas Bose. I wish you good luck with your career!

March 12, 2021 PhD Supervision
Congratulations to Dr Salah Talamali for obtaining his PhD from the University of Sheffield with a thesis on "Simple individual behavioural rules for improving the collective behaviours of robot swarms". His PhD project is a brilliant investigation on very simple rules at the individual robot level that lead to interesting swarm-level behaviours. It has been a pleasure to co-supervise you together with James Marshall. I wish you good luck with your position at UCL in London!

10 - 11 March 2021 Attending R2T2 2021
Presenting my work in progress on "Inflexible minorities prevent group consensus and cross-inhibition restores agreement" at R2T2: Robotics Research for Tomorrow's Technology, a work done in collaboration with Raina Zakir. Honoured to be presenting my work among a great group of speakers! and thanks, TII, for organising this great free event.

December 1, 2020 New Fellowship
Excited to kick off my new 3 years Fellowship by FNRS on the project "Heterogeneity for Cost-Effective Robot Swarms". Looking forward to work again with Marco Dorigo and his team at IRIDIA, the Institute for Interdisciplinary Studies on Artificial Intelligence of the Université Libre de Bruxelles, in Brussels.

26 - 28 October 2020 Attending ANTS 2020
Attending the conference ANTS 2020. My co-author Heiko Hamann will present our work "Guerrilla Performance Analysis for Robot Swarms: Degrees of Collaboration and Chains of Interference Events". The ANTS conference remains a great event to meet some of the best scientists in swarm intelligence.
2020-2021 Special Issue
I am the Guest Editor of the Special Issue on Collective Decision Making in Natural and Artificial Systems to appear in the Swarm Intelligence journal. My co-editors are Eliseo Ferrante and Gabriele Valentini.
We received a good number of high quality manuscripts that we are evaluating with the fantastic help of our reviewers!
20-21 August, 2020 Virtual poster
Check out my virtual poster presentation for the Animal Behavior Live conference. James Marshall and I looked at how "Negative feedback may suppress variation to improve collective foraging performance". A theoretical study that may explain why negative feedback evolved in social insect foraging.

July 14, 2020 Invited lecture
Invited as lecturer at the Workshop at the Mathematical Center in Akademgorodok of the University of Novosibirsk, for the project "Model of opinion dynamics in complex systems with one centralised communication channel". Thank you, Alexey Medvedev, for the kind invitation. It has been fun!

June 29, 2020 SIAM Life Sciences 2020
I have been invited as a speaker to the mini-symposium on "Multi-scale Models of Decision-making" of the conference SIAM Life Sciences 2020. The conference, due to COVID-19 restrictions, will happen online, please check my talk scheduled for June 24th, 2020
June 9, 2020 New preprint
Please check our new preprint "Scalability in Computing and Robotics" by Heiko Hamann and myself on arXiv, and send us your comments on it! We are happy to know what you think about it and include suggestions in the new version of it.
June 2, 2020 Invited lecture
Invited (virtual!) lecture at the Department of Applied Mathematics of the University of Colorado Boulder in USA. Thank you, Subekshya Bidari, for the invitation.
May 18, 2020 New article
My commentary "Robot teams stay safe with blockchains" on the paper by Strobel et al. (2020) is out on Nature Machine Intelligence! Go to check out how blockchain can help swarm robotics.

April 2020 Organiser
Unfortunately, the Conference on Collective Decision Making which was planned for May 20th-21st, 2020, in Sheffield, has been cancelled due to the COVID-19 outbreak.

February 18, 2020 Invited lecture
Invited lecture at the naXys, the Namur Institute For Complex Systems of the University of Namur in Belgium. Thank you, Elio Tuci and Timoteo Carletti for the invitation. It has also been a nice occasion to meet in person Duccio Fanelli, with whom I look forward to collaborating. :-)
January 28, 2020 Swarm Intelligence's Editor
Happy to join today the editorial board of Swarm Intelligence from Springer Nature. A great scientific journal for interdisciplinary research on #CollectiveBehavior #SwarmRobotics #SwarmIntelligence
#DistributedSystems
Looking forward to your submission!

January 26, 2020 Invited lecture
Invited lecture at the Carnegie Mellon University Qatar, in Doha. Thank you, Gianni Di Caro, for the invitation. I look forward to meeting you again. :-)

January 23, 2020 Invited lecture
Invited lecture at the Indraprastha Institute of Information Technology (IIIT), Delhi, India.
January 21, 2020 Invited lecture
Invited lecture at the Indian Institute of Science Education and Research Bhopal (IISER). Thank you, Sujit, for the invitation!

2019 - 2020 Documentary
The collaboration with the artist Suki Chan is giving its first results. Here the trailer (featuring part of my interview) of the documentary I and my research will be part of. For a longer read, see the post on the Arts Council page.

December 2, 2019 Invited lecture
Invited lecture at the Research Center on Animal Cognition (CRCA), part of the Center for Integrative Biology in Toulouse (CBI Toulouse, CNRS), France. Thanks to the IVEP team of Raphael Jeanson and Audrey Dussutour for the great hospitality and the opportunity to meet your lab members.
November 22, 2019 Invited talk
Pleased to give an invited talk at the mini-symposium organised by Takashi Ikegami and Hemma Philamore on "Swarm Intelligence in AI and ALife" in Okinawa. It has been a very nice and productive meeting!!

20-22 November 2019 Attending SWARM 2019
I will attend SWARM 2019 (the 3rd International Symposium on Swarm Behavior and Bio-Inspired Robotics ) in Okinawa, Japan from 20th to 22nd of November. I will present some of the recent results from the Swarm Awareness project. See you there!
November 2019 Swarm Intelligence's Editor
Thanks to the General Chair, Marco Dorigo, for the great opportunity to serve as a Guest Editor for Swarm Intelligence. The first part of the edited issues is out in November 2019 with a collection of great articles.

October 30, 2019 Accepted article
The article "Comparison of magnitude-sensitive sequential sampling models in a simulation-based study" has been accepted for publication on the Journal of Mathematical Psychology. Congratulations to all the co-authors.
September 30, 2019 Accepted article
Great news for people that like models but don't want too much maths. Our article that describes MuMoT, the "Multiscale Modelling Tool: Mathematical Modelling of Collective Behaviour without the Maths" has been accepted today for publication on PLoS ONE. Try MuMoT and enjoy modelling github.com/DiODeProject/MuMoT.
September 27, 2019 Accepted article
Just accepted out latest paper on collective resource collection by a robot swarm inspired by pheromone foraging in ants. The robots follow a behaviour simpler than real ants but display a similar collective behaviour. Out now on Swarm Intelligence, titled "Sophisticated Collective Foraging with Minimalist Agents: A Swarm Robotics Test" by M.S. Talamali et al.

2-6 September 2019 Hosted visiting researcher
Happy to have hosted at Sheffield Robotics for 5 days the visiting researcher Dr. Michal Pluháček from Tomas Bata University in Zlín. We improved the cool algorithms that he designed to allow Kilobots play the game of life. Cool stuff.

August 21, 2019 Accepted article
Great! The article titled "Coherent collective behaviour emerging from decentralised balancing of social feedback and noise", by I. Rausch, A. Reina, P. Simoens, and Y. Khaluf, has been accepted in the journal Swarm Intelligence (Springer). Congratulations to all the co-authors of this article!!

July 5, 2019 Invited lecture
Invited lecture at the Collective Behaviour Lab of the Max Planck Institute of Animal Behaviour and the University of Konstanz, Germany. Thank you, Iain Couzin, for the great hospitality and the opportunity to meet your lab members.

March - July 2019 Hosted visiting researcher
Glad to have hosted at Sheffield Robotics for 4+ months the visiting researcher Dr. Yara Kalhuf from Ghent University. It has been great to have you here! :-)

Summer 2019 Student supervision
Supervision of the student Stefan Balan together with Roderich Gross in the SURE Project on "Differences in efficency between a Kilobot Soft Robot and a Kilobot Rigid Robot". Cool.

June 25, 2019 Best Poster Award
Best Poster Award at the 2019 Sheffield Robotics Showcase at the University of Sheffield. Happy that my work has been appreciated by the audience and the jury.

June 18, 2019 Accepted paper
The short paper titled "A Soft-Bodied Modular Reconfigurable Robotic System Composed of Interconnected Kilobots" by Federico Pratissoli, Andreagiovanni Reina, Yuri Kaszubowski Lopes, Lorenzo Sabattini, and Roderich Gross has been accepted for presentation at the IEEE International Symposium on Multi-Robot and Multi-Agent Systems (MRS 2019). Well Done!!

27-31 May 2019 Attending NetSci 2019
I will attend NetSci 2019 (the International Conference on Network Science) in Burlington, Vermont where I will present our study on how Linear locally Bayes-optimal confidence-weighting can explain information cascades in group decision-making.
See you there!

20-24 May 2019 Attending ICRA 2019
I will attend ICRA 2019 (the IEEE International Conference on Robotics and Automation) in Montreal where my PhD student, Salah Talamali, will present his study "Improving collective decision accuracy via time-varying cross-inhibition";
and my MSc student, Francesco Canciani, will present his study "Keep calm and vote on:
Swarm resiliency in collective decision making".
See you there!

May 2, 2019 Invited lecture
Invited lecture at the University of Luebeck, Germany, in the Institute of Computer Engineering. Thank you, Heiko Hamann , for the invitation!! Great opportunity to visit a great university and the natural beauties of North of Germany.

April 30, 2019 Accepted article
The article titled "Frequency-sensitivity and magnitude-sensitivity in decision-making: a computational study" by Thomas Bose, Freya Bottom, Andreagiovanni Reina, and James Marshall has been accepted in the Computational Brain & Behavior journal (Springer). Well Done!!

April 27, 2019 Accepted short paper
The short article "Keep calm and vote on: Swarm resiliency in collective decision making", by F. Canciani, M.S. Talamali, J.A.R. Marshall, and A. Reina has been accepted for presentation at the Workshop: Resilient Robot Teams of ICRA 2019, the IEEE International Conference on Robotics and Automation, held in Montreal, on 24th May.

April 16, 2019 MSc Thesis co-supervision
The student Francesco Canciani, under my supervision and with co-supervision from James Marshall, Salah Talamali, and Francesco Amigoni, successfully defended his MSc Thesis titled "Swarm Resiliency in Collective Decision-Making" from Politecnico di Milano (Department of Electronics, Information, and Bioengineering)!
Francesco worked on his final-year MSc project for 6 months at Sheffield Robotics. He did a great job and all the team was very happy to have him around.
Congratulations Francesco for your well deserved success, and Good Luck with your future!

Spring 2019 Associate Editor IROS 2019
Contributing as Associate Editor to IROS 2019, the IEEE/RSJ International Conference on Intelligent Robots and Systems, Macau (November, 3-9, 2019).

Feb 2019 MSc Thesis co-supervision
The student Federico Pratissoli, supervised by Lorenzo Sabattini, Roderich Gross, myself, and Yuri Kaszubowski Lopes, successfully defended his MSc Thesis titled "The Kilobot Soft Robot: A Soft-Bodied Modular Reconfigurable Robotic System" from Università degli studi di Modena e Reggio Emilia (Department of Science and Engineering)!
Federico conducted his thesis at Sheffield Robotics with us and the Sheffield's Kilobot swarm. He did an excellent job with extraordinary results!!
Congratulations Federico! and Good Luck with your Career!
February 4, 2019 New Post-Doc
A big Welcome to Arindam Saha who joins us to start his post-doc on the Swarm Awareness under the lead of James Marshall and myself. Arindam joins us from the University of Oldenburg where he just completed his PhD.
January 26, 2019 Accepted article
The article "Improving collective decision accuracy via time-varying cross-inhibition", by M.S. Talamali, J.A.R. Marshall, T. Bose, and A. Reina has been accepted for publication as a full paper on the Proceedings of ICRA 2019, the IEEE International Conference on Robotics and Automation, held in Montreal, on 20-24th May.

January 12, 2019 Accepted article
The article titled "Inhibition and excitation shape activity selection: effect of oscillations in a decision-making circuit" by Thomas Bose, Andreagiovanni Reina, and James Marshall has been accepted in the Neural Computation journal (the MIT Press). Well Done!!
Dec 2018 - June 2019 New student project
Happy to start the project "A Robot Swarm Orchestra" based on robots, music, and art with Gianmarco Pisanelli at Sheffield Robotics funded by the OnCampUS Placements framework by the University of Sheffield.
December 7, 2018 Promotion!
Glad to receive a promotion to Research Fellow in Collective Robotics at the University of Sheffield.
November 26, 2018 Invited lecture
Invited lecture at the University of Southern Denmark, SDU in the Maersk Mc-Kinney Moller Institute. Thank you, Anders Lyhne Christensen , for the invitation!! Happy to catch up with ex-IRIDIAns!
November 9, 2018 Seminar
Invited talk "AI: a bridge towards the future" (in Italian, "Intelligenza Artificiale: un ponte verso il futuro") at Centro Culturale Luigi Padovese in Cucciago (CO), Italy. General public talk about AI, its successes, its limits, and its impact to the society. Open discussion in company of Dr Mauro Ceroni, Associate Professor at University of Pavia.
November 8, 2018 Teaching Recognition
I am glad to receive today the recognition of Fellow of Higher Education Academy (FHEA)!

November 4, 2018 On the media
Today, I appeared mentioning the use of swarm robotics for artificial pollination as part of the show "Indovina chi viene a cena" broadcasted on the Italian National TV Rai 3.

October 31, 2018 Best Paper Award
Our paper "Quality-sensitive foraging by a robot swarm through virtual pheromone trails" has been awarded as the Best Paper of ANTS 2018, the 11th International Conference on Swarm Intelligence. This year quality of papers and competition was very high, resulting in a great ANTS 2018 conference!! Thanks everyone!

Oct 29-31, 2018 Publication chair
I am delighted to be the Publication Chair of ANTS 2018, the Eleventh International Conference on Swarm Intelligence, which will be held on October 29-31, 2018 in Rome, Italy.
25-26th October 2018 Meetings
Participating to the international workshop "Swarm Robotics: Pushing the state of the art in Rome. A great opportunity to meet colleagues and friends, and attending fantastic talks.

October 11, 2018 Invited lecture
Invited lecture at the Bristol Robotics Lab as part of the Collective Dynamics seminars. Speaking about "Decentralised Value-Sensitive Decision Making: From Bees to Robots". Thank you, Sabine Hauert, to invite me there and for the fabolous tour of BRL! :-)

September 24, 2018 Master Thesis co-supervision
The student Francesco Canciani from Politecnico di Milano (Italy) started his six months visit to Sheffield Robotics. Francesco will do his MSc thesis project under the supervision of myself and James on "swarm resiliency in collective decision-making". Welcome, Francesco!

September 5, 2018 Invited lecture
Invited lecture at the IDLAB of the Department of Information Technology at the Ghent University, in Belgium titled "Decentralised Value-Sensitive Decision Making: From Bees to Robots".
August 7, 2018 Awarded Grant
James Marshall and I have been awarded the basic research grant Swarm Awareness from the ONRG.
The Swarm Awareness project aims to endow a swarm with awareness of its own state, thus allowing individual agents to reach a consensus on the global swarm state. Particular examples of states to measure are swarm size (number of agents), fraction of the swarm committed to a unique decision (quorum), and super-threshold decision (decision-state).

August 6, 2018 h-index
My Google Scholar profile reached h-index 10. Happy to see that my studies are receiving attention from the scientific community.

23-27 July 2018. Attending ECMTB 2018
Going to present the work "Studying Psychophysical Laws in the Superorganism through a Novel Automated Analysis Tool" at the 11th European Conference on Mathematical and Theoretical Biology (ECMTB 2018) which will be held in Lisbon, Portugal, from 23 to 27 July, 2018.

19-22 July 2018 Public Engagement
We went to showcase the Sheffield Robotics research at the BlueDot festival. Very intense four days.
Great festival, great people, great bands!!
June 21, 2018 Robot Film
Released the Short Robot Film: No War.
Robots become every day more 'intelligent'. What if robots will be so intelligent to say NO to war? This would be a happier future.
June 20, 2018 Swarm Intelligence's Editor
Just accepted the invitation as Guest Editor for the ANTS 2018 special issue of Swarm Intelligence, Springer.

June 15, 2018 Accepted article
The article "Quality-sensitive foraging by a robot swarm through virtual pheromone trails", by A. Font Llenas, M.S. Talamali, X. Xu, J.A.R. Marshall, and A. Reina has been accepted for publication as a full paper on the Proceedings of 11th International Conference on Swarm Intelligence (ANTS 2018).

June 15, 2018 Accepted article
The article "Simulating Kilobots within ARGoS: models and experimental validation", by C. Pinciroli, M.S. Talamali, A. Reina, J.A.R. Marshall and V.Trianni has been accepted for publication as a full paper on the Proceedings of 11th International Conference on Swarm Intelligence (ANTS 2018).

May 30, 2018 Teaching
The student Trisha A. Dela Luna from Sheffield Hallam University will do her MSc thesis with us on a project titled "Emergence of traffic lanes in a robot swarm" under the co-supervision of myself, Salah Talamali, Prof. James Marshall, and Dr. Xu Xu. Welcome Trisha!
May 8, 2018 Talk at the Conference on Collective Behaviour
The Conference on Collective Behaviour held at ICTP (International Centre for Theoretical Physics) of Trieste has been fantastic! The scientific level was exceptionally high and it has been great to meet so many good researchers all in one place. If you want to see my talk, it is available at this link: http://indico.ictp.it/event/8307/session/1/contribution/17/material/video/.
May 1, 2018 PhD supervision
The PhD student Salah Talamali, who is supervised by James Marshall and me, has successfully passed his First Year Confirmation Review and starts his second year of PhD studies. Congratulations, Salah!
April 23, 2018 Teaching
Invited lecture "Collective decision-making: from bees to robots" at the course COM6009 Modelling and Simulation of Natural Systems. Thanks, Dr Dawn Walker for the invitation.

April 10, 2018 On the media
Today, it has been broadcasted my interview on the BBC Radio Sheffield about my recent work on Psychophysical Laws and the Superorganism published in Scientific Reports.
April 5, 2018 On the Media
The Canadian TV, CBC, came to interview the DiODe and Brains on Board teams at Sheffield Robotics. Here below, their footage featuring among others James Marshall and myself.

March 29, 2018 On the Media
Our latest article received some interest from the public and my interview went on various media, including Newsweek, Daily Mail Online, BBC Wildlife Magazine, and my hometown newspaper La Provincia.

March 13, 2018 Master Thesis co-supervision
The student Anna Font Llenas, supervised by Dr. Xu Xu, myself, Salah Talamali, and Prof. James Marshall, successfully defended her Master Thesis in Automation, Control and Robotics from Sheffield Hallam University! Congratulations Anna! and Good Luck for your future!

February 22, 2018 Accepted article
The article "Psychophysical Laws and the Superorganism", by A. Reina, T. Bose, V. Trianni, and J.A.R. Marshall has been accepted for publication on Scientific Reports. See all the publications.

Spring 2018 Associate Editor IROS 2018
Contributing as Associate Editor to IROS 2018, the IEEE/RSJ International Conference on Intelligent Robots and Systems, Madrid (October, 1-5, 2018).

December 2017 - June 2018 New student project
I am happy to start a new project based on robot and art in collaboration between the Department of Computer Science of the University of Sheffield and the Sheffield Institute of Arts of Sheffield Hallam University. The project is partially funded by the OnCampUS Placements framework by the University of Sheffield. The project aims to create an art performance in which hundreds of Kilobot robots will perform as artists.

November 23, 2017 Seminar
During the invited lecture titled "A Tool for Automated Analysis of Collective Behaviour Models" at the Université Libre de Bruxelles (joint seminar IRIDIA and Unit of Social Ecology), I will present the new open-source software that we developed to help everyone with the analysis of collective behaviours.

November 2017 Seminars
During the month of November 2017, I gave invited lectures titled "Decentralised Value-Sensitive Decision Making: From Bees to Robots" in three prestigious laboratories of Japan: the Matsuno Lab at the Kyoto University (Nov 2), the Ohkura Laboratory of the Hiroshima University (Nov 6), and the Ikegami Laboratory of the University of Tokyo (Nov 8). I am glad I had the opportunity to meet with researchers of these groups, as well as to discover some of the Japanese culture. It has been fantastic! Thank you everyone for inviting me! and finally thank you, Prof. Kiyohiko Hattori, for helping me during my lovely Japanese journey.

October 29 - November 1, 2017 Conference SWARM 2017
Attending the SWARM 2017: The 2nd International Symposium on Swarm Behavior and Bio-Inspired Robotics which will be held in Kyoto, Japan. I will present our study on Psychophysical Laws in the Superorganism.

September 24-28, 2017 Conference IROS 2017
Attended the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2017), held in Vancouver, Canada. I presented ARK, Augmented Reality for Kilobots, published on IEEE Robotics and Automation Letters 2(3): 1755-1761 (2017) by A. Reina, A.J. Cope, E. Nikolaidis, J.A.R. Marshall, C. Sabo. Online video: https://www.youtube.com/watch?v=K0KvPzhOSDo
July 2017 - March 2018 Teaching
The student Anna Font Llenas from Sheffield Hallam University will do her MSc thesis with a project titled "Value-sensitive decisions through pheromone trails" under the co-supervision of myself, Salah Talamali, Prof. James Marshall, and Dr. Xu Xu.
Welcome!
July 13, 2017 Bachelor Thesis co-supervision
The student Eleftherios Nikolaidis, supervised by Dr. Tzekis Panagiotis, myself, and Prof. James Marshall, successfully defended his Bachelor Thesis titled "Creation of an overhead controller for the Kilobots and collective behavior" from Alexander Technological Educational Institute of Thessaloniki! Congratulations Eleftherios! and Good Luck with your MSc in Surrey!
10-12 July 2017 Minisymposium @MMEE-2017
Organised the minisymposium on Collective Decision Making at MMEE 2017, Mathematical Models in Ecology and Evolution in London.

May 2, 2017 PhD supervision
I started the co-supervision (with James Marshall) of the PhD student Salah Talamali who joined the DiODe team to investigate "The role of heterogeneity in collective decision making in robot swarms"!! Welcome Salah!

April 19, 2017 Accepted article
The article "A model of the best-of-N nest-site selection process in honeybees", by A. Reina, J.A.R. Marshall, V. Trianni, and T. Bose has been accepted for publication on Physical Review E. The article has been selected as Editors' Suggestion and included in the Research Highlights of Nature Physics.

April 10, 2017 Accepted article
The article "ARK: Augmented Reality for Kilobots", by A. Reina, A.J. Cope, E. Nikolaidis, J.A.R. Marshall, and C. Sabo has been accepted for publication on IEEE Robotics and Automation Letters.

March 13, 2017 Accepted paper
The article "Scheduling the Access to Shared Space in Multi-Robot Systems", by Y. Khaluf, C. Markarian, P. Simoens, A. Reina is accepted for publication in the Proceedings of the 15th International Conference on Practical Applications of Agents and multi-agents systems (PAAMS'17).

March 8, 2017 Accepted article
The article "Collective Decision-Making", by T. Bose, A. Reina, and J.A.R. Marshall, has been accepted for publication on Current Opinion in Behavioral Sciences.
Spring 2017 Associate Editor IROS 2017
Contributing as Associate Editor to IROS 2017, the IEEE/RSJ International Conference on Intelligent Robots and Systems.
February 21, 2017 On the media
Today, it we recorded a video for the BBC Radio 1 show "Can A Robot Replace Ed Sheeran? which features hundreds of Kilobots from Sheffield Robotics. I coordinated the demo and the video recording.

January 27, 2017 Master Thesis co-supervision
The student Salah Talamali, supervised by Dr. Hongwei Zhang, Prof. James Marshall, and myself, successfully defended his Master Thesis titled Automatic calibration for scalable collective robotics and brilliantly completed his studies with Distinction, 77%! Congratulations Salah! Well Done!!!
Merry Christmas New Video
Season greetings from the DiODe team and the Kilobots at Sheffield Robotics.

December 21, 2016 Award
I've been recognised as Dedicated Outstanding Thesis Mentor! Thanks @kayguccione to run the thesis mentoring programme.
6-9 November 2016 Conference DARS 2016
Presenting our work "Effects of Spatiality on Value-Sensitive Decisions Made by Robot Swarms", A. Reina, T. Bose, V. Trianni, J.A.R. Marshall, at DARS, the 13th International Symposium on Distributed Autonomous Robotic Systems at the Natural History Museum in London, UK.

October 24, 2016 Seminar
Invited talk "Decentralised decision making in honeybees and in artificial swarms" at the Swarm Lab headed by Simon Garnier at the New Jersey Institute of Technology. Cool lab with a mix of robots and slime molds.

17-21 October 2016 Visiting collaborators
DiODe Group trip to the University of Princeton to visit the project collaborators: Naomi Leonard, Phil Holmes, Jon Cohen and their groups. Four days sharing ideas, planning future steps and interacting with amazing scientists. Among others we also met Nathaniel Daw, Debora Gordon and Corina Tarnita. What a great trip. Looking forward to fruitful collaborations.
Fall 2016 Research
Leading a team of five people composed of Alex Cope, Chelsea Sabo, Eleftherios Nikolaidis, Salah Talamali and Michael Port with the goal of building an augmented reality arena for our kilobot swarm. Let's try!

September 30, 2016 Public outreach - Researcher Night
Presented our studies on decentralised decision making at the researcher night. We got the attention of children and adults through our 80 robot swarm! A nice evening!

September 2016 - April 2017 Teaching
The student Eleftherios Nikolaidis, from Alexander Technological Educational Institute of Thessaloniki (ATEITHE), Greece, joined the DiODe group through an Erasmus Internship Scholarship of 6 months. I will guide him to build new IR boards to communicate with our robot swarm!! Welcome!
8-9 September 2016 Conference ANTS 2016
Attending the conference ANTS 2016, the 10th International Conference on Swarm Intelligence in Brussels. A great opportunity to visit colleagues and see inspiring talks like the one of Iain Couzin!
September 7, 2016 Accepted paper
The paper "Effects of Spatiality on Value-Sensitive Decisions Made by Robot Swarms" by A. Reina, T. Bose, V. Trianni and J.A.R. Marshall is accepted at the 13th International Symposium on Distributed Autonomous Robotic Systems.
23-26 August 2016 Conference SAB 2016
Presenting "Swarm deadlock for symmetric choices over three or more options" at SAB 2016, the 14th International Conference on the Simulation of Adaptive Behavior in Aberystwyth. Thank you, Elio Tuci, for the hospitality.

28 July- 2 August 2016 Conference ISBE 2016
Presenting our work "A model of the honeybee best-of-N nest-site selection process" at the 6th congress of the International Society for Behavioral Ecology in Exeter.
July 2016 - January 2017 Teaching
The student Salah Talamali from Sheffield Hallam University will do his MSc thesis with me and James on "Automatic calibration for scalable collective robotics". Welcome!
Closed Recruiting
Open position as a Research Associate in Collective Robotics for 1 year within the ERC project "DiODe: Distributed Algorithms for Optimal Decision-Making" led by Prof. James Marshall at the University of Sheffield, UK.
The post holder will have the opportunity to work with a 1,000 robot swarm in an internationally-leading research environment (the Department of Computer Science was ranked 5th in the UK as part of the 2014 Research Excellence Framework evaluations).
We are looking for outstanding candidates that have (or are about to receive) a PhD in Computer Science or Electronic Engineering, experience of designing and developing electronic circuit boards, and experience of device firmware programming.
More information can be found at: https://t.co/6H92Stt79c
Application deadline: August 11th, 2016
July 4, 2016 PhD !
I obtained my PhD title! Finally! I'm Happy of the achievement!
June 29, 2016 Conference TAROS
Demonstration of an experiment with 100 kilobots at the conference TAROS during the visit at the Sheffield Robotics Lab.

16 - 21 May 2016 Attending ICRA 2016
Presenting the work Emergence of Consensus in a Multi-Robot Network: from Abstract Models to Empirical Validation, by V. Trianni, D. De Simone, A. Reina, A. Baronchelli at ICRA 2016 in Stockholm.
May 11, 2016 Science outreach
Took part of the outreach event with the Sheffield Robotics Outreach event organised by Chelsea Sabo. Thank you for this beautiful opportunity.

9 - 10 May 2016 Visiting collaborators
Visiting Prof. Peter Swain and his laboratory at the University of Edinburgh. Fantastic occasion to see research at the cutting edge of cellular decision making.
April 22, 2016 Networking
Attending the Research Away Day of the Department of Computer Science. A nice opportunity to meet colleagues working on interesting things few steps away.
March 11, 2016 Public engagement - Discovery Night
Showcase of one of my experiments with a swarm of robots at the Discovery Night. A lot of interested people and the kids loved it!! :-)
2-3 March 2016 Visiting collaborators
Visiting the project collaborator Sander van Doorn and his group for putting the basis for a collaboration on cellular decision making studies.

Spring 2016 Associate Editor IROS 2016
Contributing as Associate Editor to IROS 2016, the IEEE/RSJ International Conference on Intelligent Robots and Systems.
February 24, 2016 Hosted guest
Invited Cristian Fernández-Oto from the Department of Physics of Université Libre de Bruxelles to give a talk at the join seminar of the Biological Physics and Mathematical Biology groups.

January 5, 2016 Accepted article
Accepted journal paper V. Trianni, D. De Simone, A. Reina, A. Baronchelli. Emergence of Consensus in a Multi-Robot Network: from Abstract Models to Empirical Validation. Robotics and Automation Letters, IEEE, vol.PP, no.99, pp.1, 2016.
October 23, 2015 New Article!
Now online our journal article: A. Reina, G. Valentini, C. Fernàndez-Oto, M. Dorigo and V. Trianni. A design pattern for decentralised decision making. PLoS ONE 10(10): e0140950, 2015. Congratulations to all the co-authors, and a special thanks to Vito for the exceptional guidance in pursuing this research path and achieving this exceptional result!
7 - 10 September 2015 Visiting collaborators
DiODe Group trip to the University of Princeton to visit the project collaborators: Prof. Naomi Leonard,Prof. Philip Holmes and Prof. Jonathan Cohen. A wonderful way to begin a new project!
September 1, 2015 New job position!
Start new position as Research Associate in Collective Robotics at the University of Sheffield under the supervision of Prof. James Marshall. I am currently involved in the ERC project DiODe - Distributed Algorithms for Optimal Decision-Making.
June 17, 2015 Invited speech
I gave a short seminar at the Institute of Cognitive Sciences and Technologies of the Italian National Research Council (ISTC-CNR), in Rome titled "A cognitive design pattern for decentralised decision making".
May 11, 2015 Accepted article
The article titled "AutoMoDe-Chocolate: automatic design of control software for robot swarms", with authors G. Francesca, M. Brambilla, A. Brutschy, L. Garattoni, R. Miletitch, G. Podevijn, A. Reina, T. Soleymani, M. Salvaro, C. Pinciroli, F. Mascia, V. Trianni and M. Birattari, has been accepted in the international journal Swarm Intelligence (Springer). Congratulations to all the co-authors of this article!!
May 4, 2015 Accepted article
The article "A quantitative micro-macro link for collective decision: the shortest path discovery/selection example", with authors A. Reina, R. Miletitch, M. Dorigo and V. Trianni, has been accepted in the international journal Swarm Intelligence (Springer). Congratulations to all the co-authors of this article!!
April 3, 2015 Accepted paper
The paper "Augmented reality for robots: virtual sensing technology applied to a swarm of e-pucks" has been accepted to the IEEE 2015 NASA/ESA Conference of Adaptive Hardware and Systems that will take place in Montreal (Canada) on June 15-18, 2015. Congratulations to all the co-authors of this article!!

March 17, 2015 Master Thesis co-supervision
The student Mattia Salvaro, which has been supervised by Prof. Michela Milano, Dr. Mauro Birattari, myself and Gianpiero Francesca, successfully defended his Master Thesis titled Virtual sensing technology applied to a swarm of autonomous robots obtaining the maximum grade for his thesis work. Congratulations Mattia! Well Done!!!
February 2015 Teaching Assistant
First lesson of the course Swarm Intelligence (INFO-H-414) in which I am teaching assistant.
1st November - 15th December, 2014 Visiting period
Visiting period at the Institute of Cognitive Sciences and Technology of the Italian National Research Council, Rome, Italy. Very fruitful collaboration with Vito Trianni
- Next on the list